The vast and deep ocean holds various mysteries that have not yet been fully revealed. Undersea exploration is a big challenge for humans because of physical limitations and extreme environmental conditions, such as high pressure, total darkness, and strong ocean currents. To overcome this challenge, unmanned underwater vehicle (AUV) technology was developed as a sophisticated solution for exploring the underwater world.
AUV is an underwater vehicle that can move independently without direct control from the operator during its mission. Equipped with various advanced sensors, such as sonar, underwater cameras, and environmental sensors, AUVs are able to carry out seabed mapping, ecosystem monitoring, and search for objects sunk in the ocean. This technology has been widely used in scientific research, marine industry, and military operations for various strategic purposes.
With the development of artificial intelligence technology and advanced navigation systems, AUVs continue to experience innovation to increase accuracy and effectiveness in underwater exploration. Therefore, research on AUVs is important in supporting marine exploration, mapping marine resources, and efforts to conserve underwater ecosystems for the sustainability of the maritime environment in the future.
Autonomous Underwater Vehicles (AUV) are equipped with various sophisticated instruments that enable these vehicles to carry out their missions autonomously under the sea. These instruments play an important role in navigation, data collection, communication, and controlling the AUV during operation. Each instrument has a specific function tailored to the needs of underwater exploration, whether for scientific research, seabed mapping, or searching for objects in deep waters. One of the main instruments used in AUVs is sonar (Sound Navigation and Ranging), which functions to detect and map underwater structures. Sonar works by sending sound waves to the seabed and analyzing their reflections to determine the shape and depth of the area being explored. Sonar that is often used in AUVs includes side-scan sonar for broad mapping, multibeam sonar for mapping seabed topography, and sub-bottom profilers for detecting subsurface layers of the seabed.
Apart from sonar, AUVs are also equipped with environmental sensors, such as temperature, salinity and water pressure sensors, which are useful in oceanographic research. These sensors help in understanding ocean dynamics, including temperature changes that can affect current patterns and marine life. Some AUVs are even equipped with chemical sensors that can detect the presence of pollutants or certain elements in the water, making them very useful in marine environmental studies and pollution detection. For navigation and orientation, the AUV uses an inertial navigation system (INS – Inertial Navigation System) combined with Doppler Velocity Log (DVL) and Global Positioning System (GPS). INS allows the AUV to accurately determine its position based on movement and changes in orientation, while DVL helps measure speed relative to the seabed. GPS is used when the AUV is near the surface to update its location before diving back to depth.
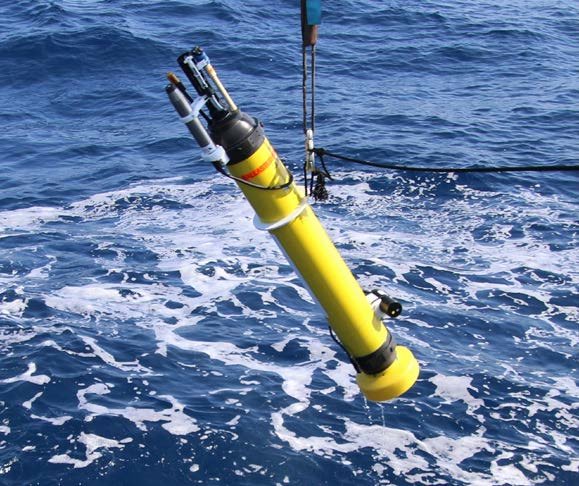
AUV consists of several main components that work in an integrated manner. The main frame (hull) functions to protect electronic components from sea water pressure. Propulsion systems, such as propellers or thrusters, are used to move the AUV in various directions. The power system, which typically uses lithium-ion batteries, provides the energy to run the entire AUV system. The control and data processing unit is responsible for automatic decision making based on data collected by sensors. Additionally, the communications module allows the AUV to transmit data to the surface or communicate with aircraft carriers using acoustic or other wireless systems.

How AUV Work
The AUV works by receiving instructions before the dive and then operating independently according to a pre-programmed algorithm. Once launched into the sea, the AUV uses its navigation system to determine its position and path of movement. Sensors installed on the AUV will collect real-time environmental data, which is then stored in internal memory. During operation, the AUV can adjust its movements based on the data received. Once the mission is complete, the AUV returns to the designated point for retrieval and the collected data is extracted for analysis.
The use of AUVs begins with mission planning which includes programming exploration paths and objectives. After that, the AUV is launched into the sea from the aircraft carrier or shore. During the dive, the AUV will collect data according to predetermined tasks. Upon mission completion, the AUV returns to the surface and the collected data is downloaded for further analysis. The operator then evaluates the mission results and, if necessary, makes adjustments to the parameters or algorithms for the next mission.
AUV strengths and weaknesses
Strengths
AUV have several advantages over other underwater exploration methods. Its main advantage is its ability to work autonomously without the need for direct human control, thereby reducing safety risks for divers or ship crew. Additionally, AUVs can explore areas that are difficult for manned submarines to reach, such as deep sea trenches or areas with strong currents.
Weaknesses
However, AUV also have several limitations, such as operational duration limited by battery capacity, as well as dependence on environmental conditions such as magnetic fields and ocean currents which can affect navigation systems. Apart from that, the price of AUVs is quite expensive and their high maintenance costs are a challenge for several research institutions and the marine industry.