Slide Scan Sonar, also known as sidescan sonar, is a sonar technology that plays an integral role in seafloor mapping and subsurface observation. Using the principle of sound reflection, slide scan sonar is able to produce detailed images of the seafloor and objects on the seafloor with a high level of resolution. The main advantage of slide scan sonar lies in its ability to provide a full visualization of the scanned area, allowing researchers, oceanographers and other interested parties to better understand the characteristics of the seafloor and other underwater phenomena. This technology is widely used in a variety of applications, including underwater geological mapping, shipwreck search and research, and marine environmental monitoring.
Side scan sonar is a system of marine survey equipment with acoustic technology that is capable of imaging underwater and producing a wide variety of images of objects on the water bottom. The visual application of side scan sonar has been the solution of choice for seafloor observations since the 1950s. Side scan sonar recordings provide a clear, high-resolution image of the seafloor, making it easier to interpret the condition of the seafloor and the objects present. The results of side scan sonar imaging are presented in two-dimensional (2D).
How Side Scan Sonar Work
- Sound Wave Emission: Slide scan sonar begins its operation by emitting sound waves into the water using a sound transducer. This transducer can be a speaker that produces high frequency sound waves.
- Wavelet Propagation: The emitted sound waves propagate down the ocean. When these waves reach the seafloor or nearby objects, some of their energy will be reflected back to the sonar transducer.
- Wave Reflection Reception: The slide scan sonar is equipped with a sensor or receiver that is sensitive to the reflected sound waves. This sensor is located on the side of the device, allowing the device to detect reflections from the area around the vessel.
- Data Recording: The sound reflection data received by the sensor is recorded and processed. This recording records the time it takes for the sound waves to go to the seabed and return to the sensor.
- Data Processing: The recorded data is then processed by specialized sonar software. This process involves analyzing the wave reflection patterns to create a visual image of the seafloor and surrounding objects.
- Image Formation: The resulting visual image shows variations in color intensity or darkness, creating a detailed representation of structures and contours on the seafloor. Taller or harder objects or features will reflect more sound energy and will appear brighter in the image.
- Navigation and Mapping: The resulting image data is used for navigation of ships or underwater vehicles, as well as for mapping the surrounding topography and underwater features. This mapping can help in a variety of applications, including marine research, natural resource exploration, and shipwreck searches.
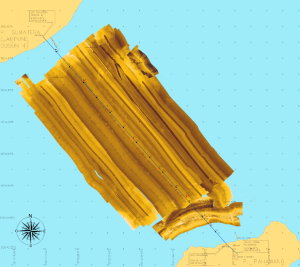
Side Scan Sonar Visualization Result
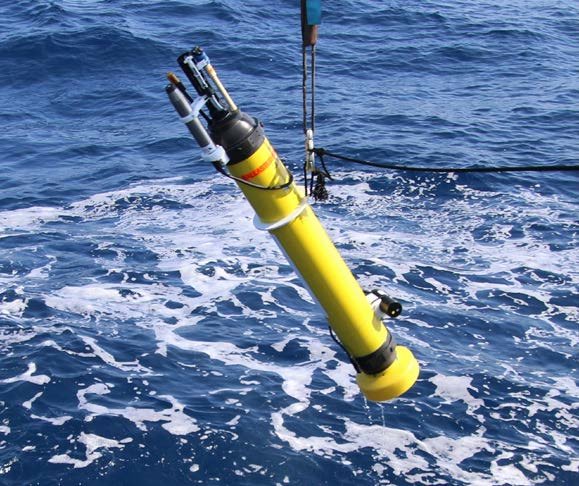
The equipment used in this survey involved a C-MAX CM2 Digital Towfish side scan sonar instrument, a Windows-based laptop with software such as MaxView, SonarWiz 5, XtfToSegy, Seisee, Ms.Excel, ArcGIS 10.2, and MATLAB for wavelet transform analysis.The side scan sonar instrument records real-time water bottom condition data using sound signals reflected by seafloor objects or textures. It operates in conjunction with a Fugro Seastar 9200-G2 Differential Global Positioning System (DGPS) with an accuracy of 0.5m to determine the survey position. Raw data from the sonar instrument in .cm2 format was converted to .xtf using MaxView software. The .xtf data was then processed using SonarWiz 5 software with the application of geometric and radiometric corrections, as well as visualization and mosaic processes. The result is a seafloor texture image with seafloor object identification. The backscatter values (amplitude) of the bottom texture and seafloor objects were processed using XtfToSegy software to convert the .xtf file into segy. The segy data is then processed with Seisee software to extract the amplitude values in the trace/ping of a particular texture or object, and saved in a .txt file. The extraction results are further treated using Ms.Excel to tidy up the data. Furthermore, the data is processed using MATLAB to obtain time-amplitude graphs of the bottom texture and seafloor objects. The unit used in the amplitude data is mV. This process provides a more in-depth analysis of the seafloor structure and objects detected in the survey.
Writer : Dinar Dewi Mada